When setting a temporary CameraInit node, the intrinsics of the actual CameraInit node are used, meaning that the temporary CameraInit has all the intrinsics information we need to fill the intrinsics table. However, when a temporary CameraInit node is set, the parsing of the intrinsics and the model update are not performed. If the active CameraInit group does not change, this is not directly visible as the table keeps on displaying the intrinsics from the actual CameraInit node. If the active group changes, we attempt to fill the table with the intrinsics of the temporary CameraInit node, which is being re-set for the active group. The intrinsics are thus not available, leading to an empty table, and the parsing is never retriggered once the temporary CameraInit has been fully set. Instead of re-parsing the intrinsics when the CameraInitIndex is updated, the parsing is triggered when the intrinsics are updated, since this ensures they will be available and its covers all the cases we could be facing. |
||
|---|---|---|
| .github | ||
| bin | ||
| docker | ||
| docs | ||
| meshroom | ||
| tests | ||
| .gitignore | ||
| .readthedocs.yaml | ||
| .travis.yml | ||
| appveyor.yml | ||
| CHANGES.md | ||
| CMakeLists.txt | ||
| CODE_OF_CONDUCT.md | ||
| CONTRIBUTING.md | ||
| COPYING.md | ||
| dev_requirements.txt | ||
| INSTALL.md | ||
| LICENSE-MPL2.md | ||
| README.md | ||
| requirements.txt | ||
| setup.py | ||
| setupInitScriptUnix.py | ||
| start.bat | ||
| start.sh | ||
Meshroom is a free, open-source 3D Reconstruction Software based on the AliceVision Photogrammetric Computer Vision framework.
Learn more details about the pipeline on AliceVision website.
See results of the pipeline on sketchfab.
Continuous integration:
- Windows:
- Linux:

Photogrammetry
Photogrammetry is the science of making measurements from photographs. It infers the geometry of a scene from a set of unordered photographs or videos. Photography is the projection of a 3D scene onto a 2D plane, losing depth information. The goal of photogrammetry is to reverse this process.
See the presentation of the pipeline steps.
Manual
https://meshroom-manual.readthedocs.io
Tutorials
Overall presentation of the Meshroom software.
Detailed tutorial with a focus on the features of the 2019.1 release.
- Photogrammetry 2 – 3D scanning with just PHONE/CAMERA simpler, better than ever! by Prusa 3D Printer
Overall presentation of the photogrammetry practice with Meshroom.
Overall presentation of the protogrammetry practice with Meshroom and detailed presentation how to do the retolopogy in Blender.
Presentation of the Meshroom software with a focus on using it for Match Moving.
License
The project is released under MPLv2, see COPYING.md.
Citation
If you use this project for a publication, please cite the paper:
@inproceedings{alicevision2021,
title={{A}liceVision {M}eshroom: An open-source {3D} reconstruction pipeline},
author={Carsten Griwodz and Simone Gasparini and Lilian Calvet and Pierre Gurdjos and Fabien Castan and Benoit Maujean and Gregoire De Lillo and Yann Lanthony},
booktitle={Proceedings of the 12th ACM Multimedia Systems Conference - {MMSys '21}},
doi = {10.1145/3458305.3478443},
publisher = {ACM Press},
year = {2021}
}
Get the project
You can download pre-compiled binaries for the latest release.
If you want to build it yourself, see INSTALL.md to setup the project and pre-requisites.
Get the source code and install runtime requirements:
git clone --recursive git://github.com/alicevision/meshroom
cd meshroom
pip install -r requirements.txt
Start Meshroom
You need to have AliceVision installation in your PATH (and LD_LIBRARY_PATH on Linux/macOS).
- Launch the User Interface
# Windows
set PYTHONPATH=%CD% && python meshroom/ui
# Linux/macOS
PYTHONPATH=$PWD python meshroom/ui
On Ubuntu, you may have conflicts between native drivers and mesa drivers. In that case, you need to force usage of native drivers by adding them to the LD_LIBRARY_PATH:
LD_LIBRARY_PATH=/usr/lib/nvidia-340 PYTHONPATH=$PWD python meshroom/ui
You may need to adjust the folder /usr/lib/nvidia-340 with the correct driver version.
- Launch a 3D reconstruction in command line
# Windows: set PYTHONPATH=%CD% &&
# Linux/macOS: PYTHONPATH=$PWD
python bin/meshroom_batch --input INPUT_IMAGES_FOLDER --output OUTPUT_FOLDER
Start Meshroom without building AliceVision
To use Meshroom (ui) without building AliceVision
- Download a release
- Checkout corresponding Meshroom (ui) version/tag to avoid versions incompatibilities
LD_LIBRARY_PATH=~/foo/Meshroom-2021.1.0/aliceVision/lib/ PATH=$PATH:~/foo/Meshroom-2021.1.0/aliceVision/bin/ PYTHONPATH=$PWD python3 meshroom/ui
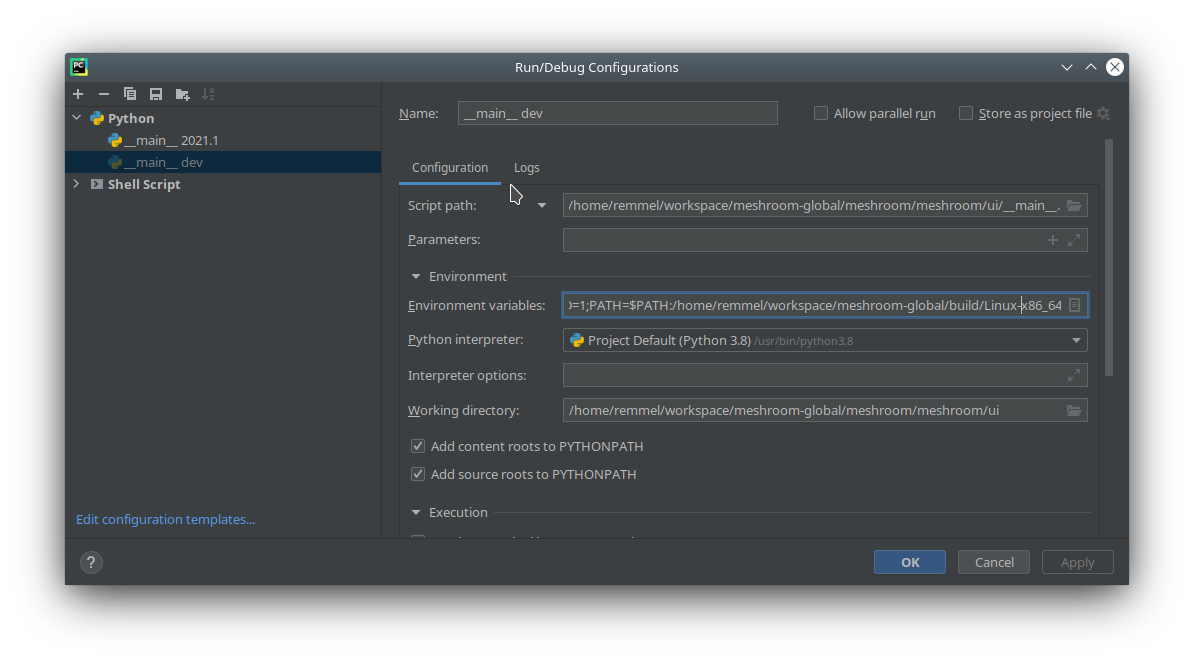
Start and Debug Meshroom in an IDE
PyCharm Community is free IDE which can be used. To start and debug a project with that IDE,
right-click on Meshroom/ui/__main__.py > Debug, then Edit Configuration, in Environment variables :
- If you want to use aliceVision built by yourself add:
PATH=$PATH:/foo/build/Linux-x86_64/ - If you want to use aliceVision release add:
LD_LIBRARY_PATH=/foo/Meshroom-2021.1.0/aliceVision/lib/;PATH=$PATH:/foo/Meshroom-2021.1.0/aliceVision/bin/(Make sure that you are on the branch matching the right version)
FAQ
See the Meshroom wiki for more information.
Contact
Use the public mailing-list to ask questions or request features. It is also a good place for informal discussions like sharing results, interesting related technologies or publications:
alicevision@googlegroups.com http://groups.google.com/group/alicevision
You can also contact the core team privately on: alicevision-team@googlegroups.com.